| Design Renderings |
Date |
Description |
 
|
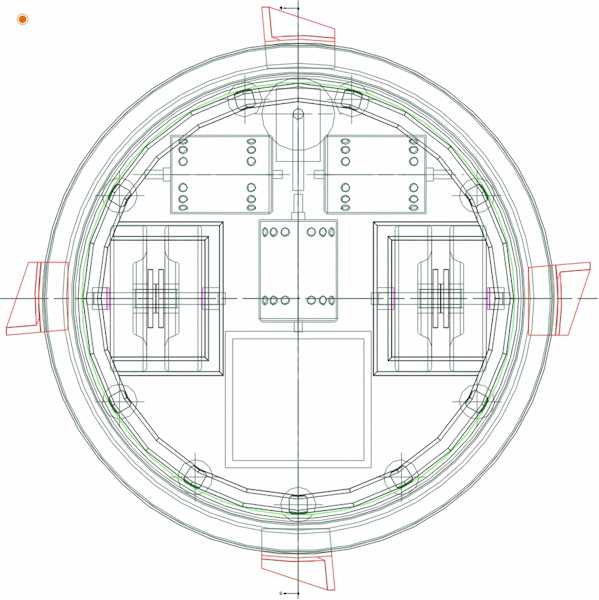
07/03/01 |
More CAD drawings. These were
plotted off at full scale and were then used for layout templates to make the robot
chassis. Also to aid the positioning of the internal components. |
 

|
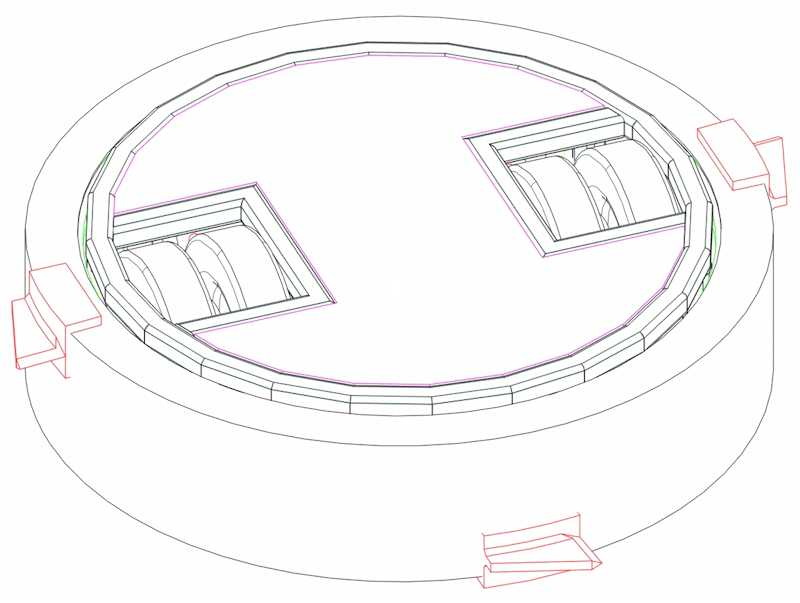
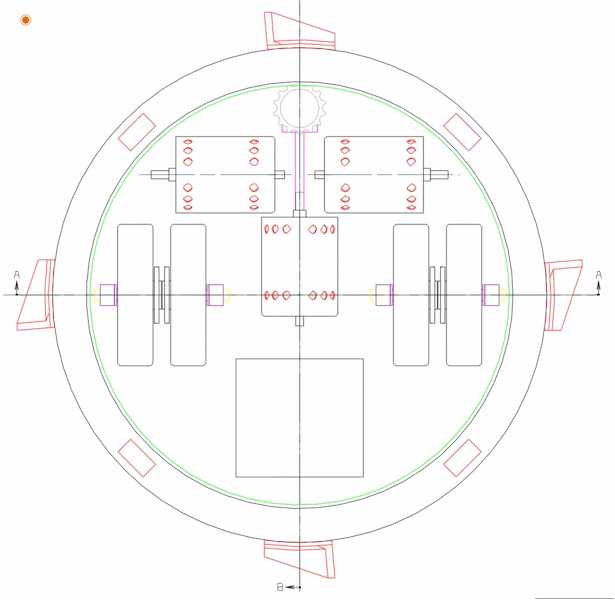
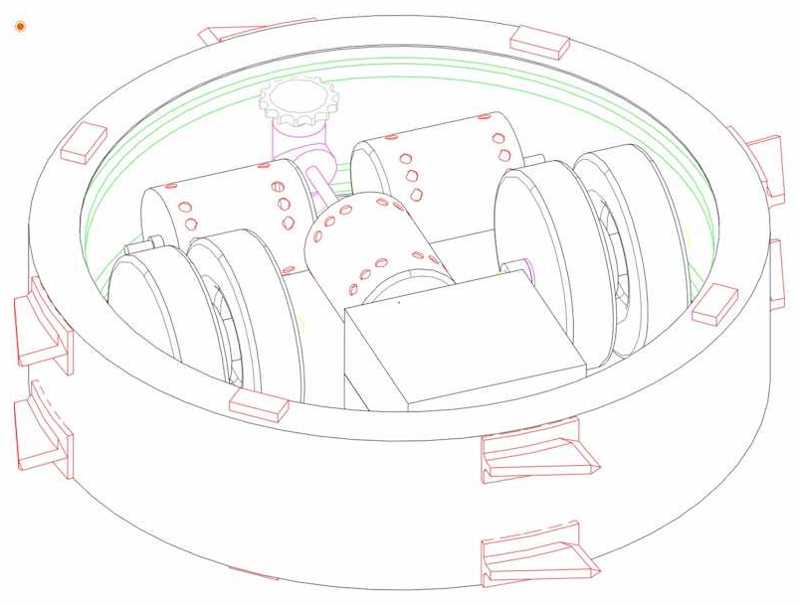
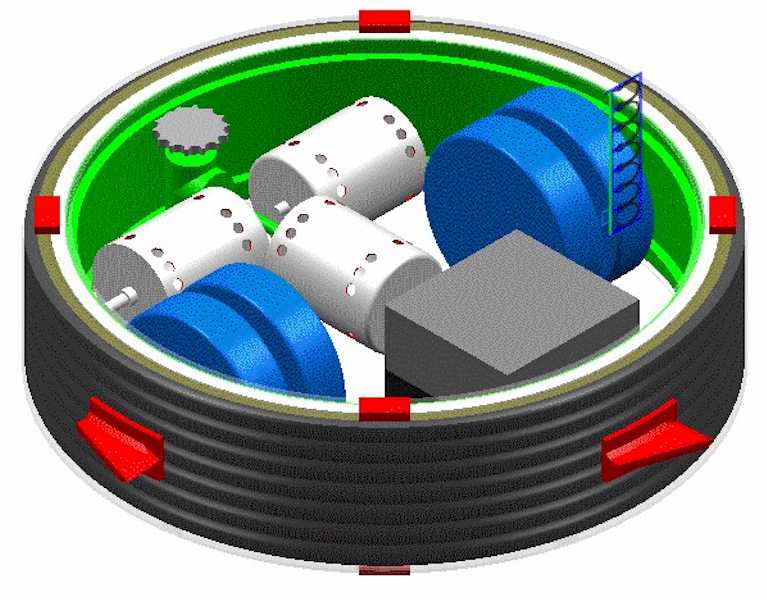
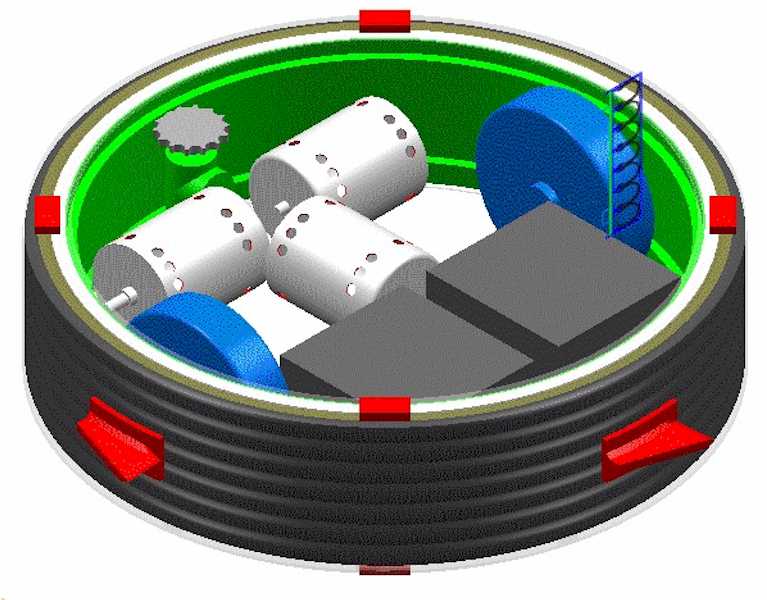
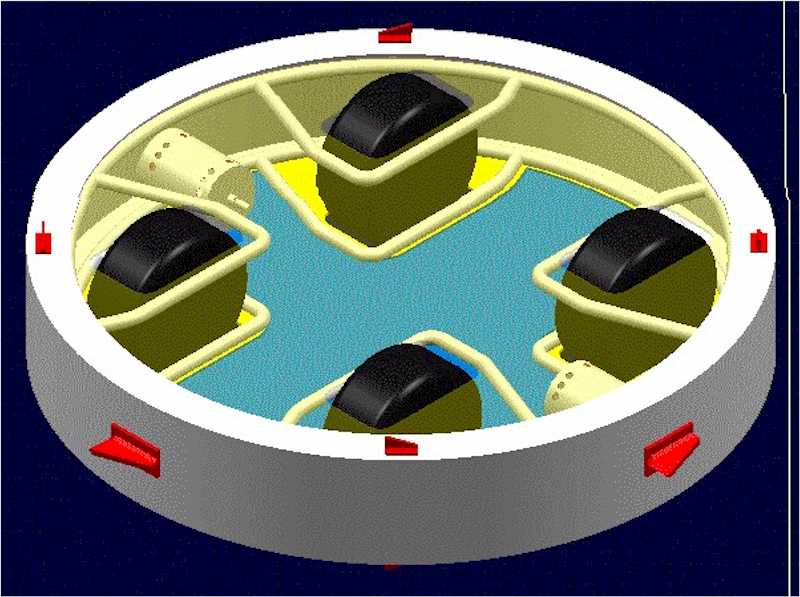
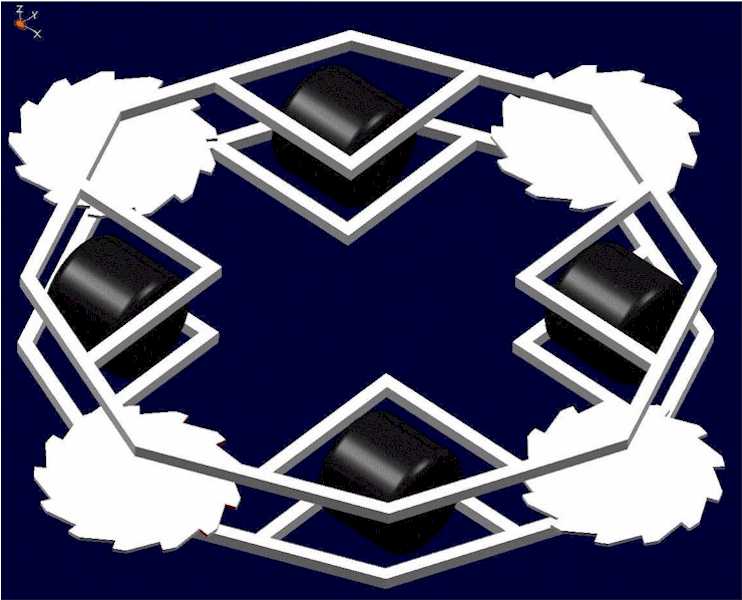
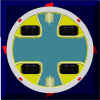
24/02/01 |
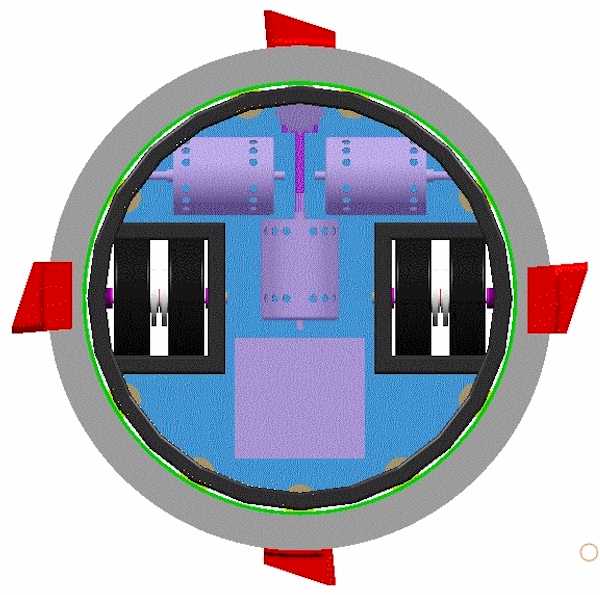
Covers have been made
transparent in this picture for clarity only, to enable you to see inside. The actual
covers however wont be, unless you have x-ray vision. Notice another change to the blade
layout? |
 

|
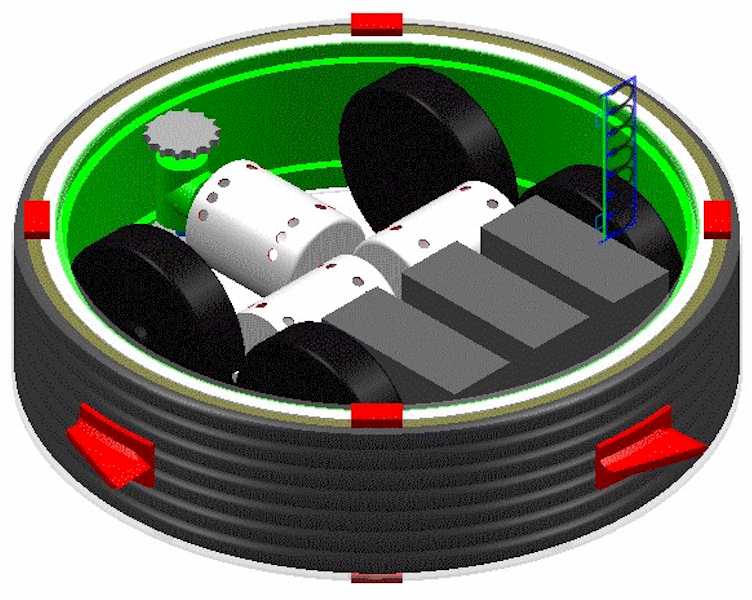
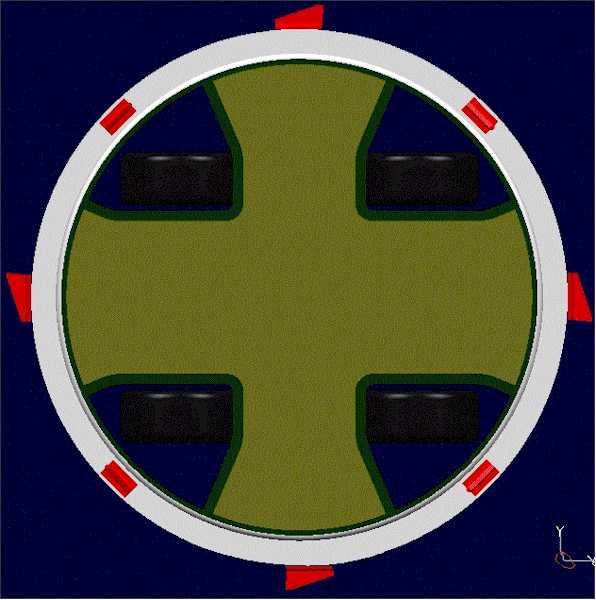
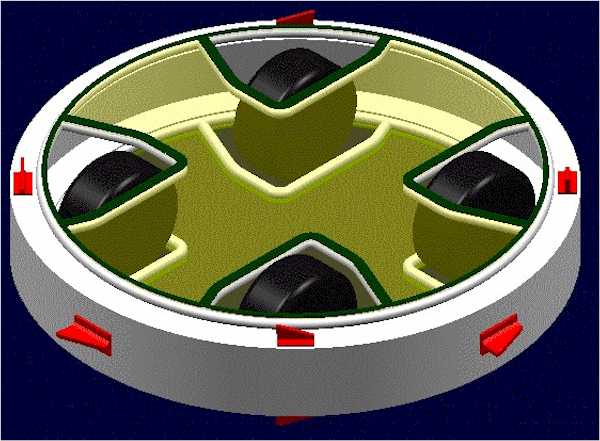
16/02/00 |
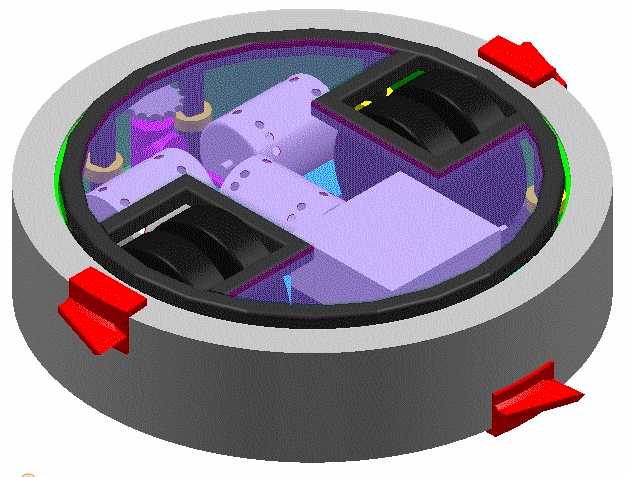
Another iteration of the
design, this time with the chassis included. Getting closer now to a final design. If you
visit The Build pages, you will have noticed that construction has
already started. Affectionally known as "Concurrent" or "Simultaneous"
Engineering, a right pain in the ass if someone changes the design!!!
Also notice there are now eight cutting blades instead of four. Decided to
mount an upper and a lower set of blades to make sure we can damage any lower protrusions,
ermm, like rear wheels off certain Hypnotic style Disc type robots!!! |

|
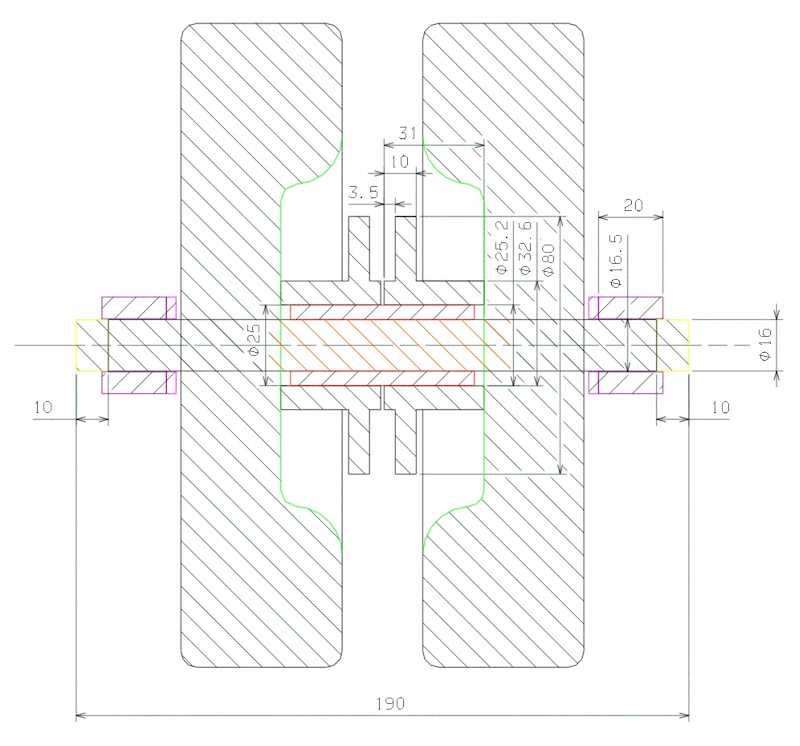
08/02/00 |
Left is a more detailed section
through the spindle units for the drive wheels. |
 
 
|
08/02/01 |
Click on the left thumbs to get
a more traditional CAD drawing, (Not Shaded). |
 |
04/02/01 |
The weapon drive gearbox which
will be connected to one of the Bosch motors. |
|
04/02/01 |
Here is the sizing info on the
Bosch 750W 24V DC Motor. We have three of them. Two for drive and one for weapon. |
 

|
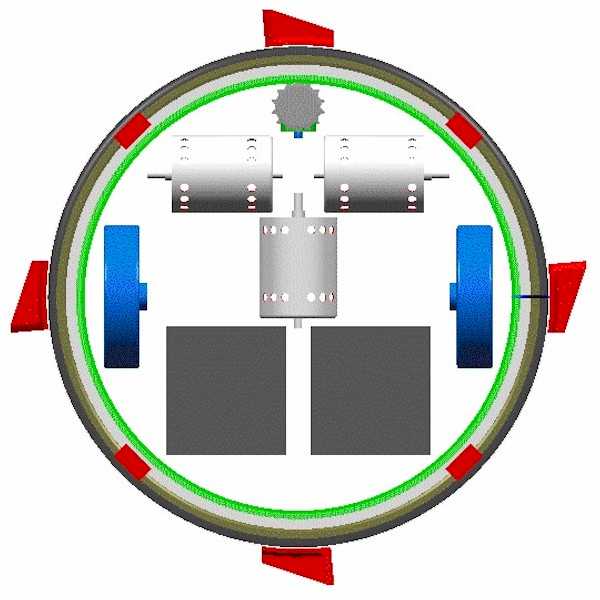
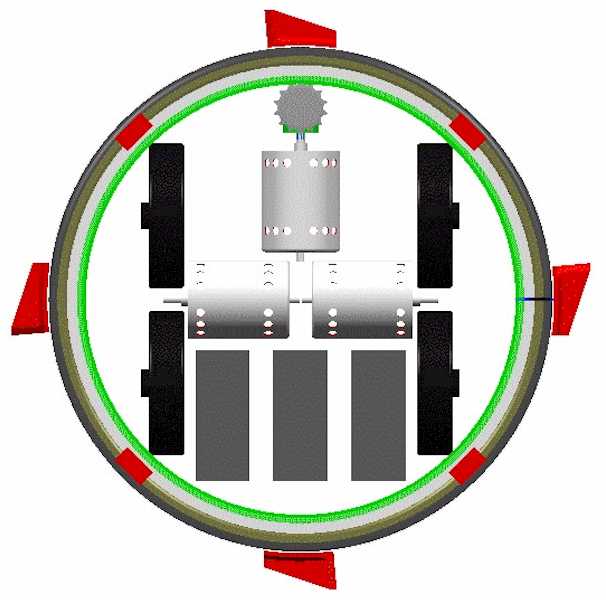
23/01/01 |
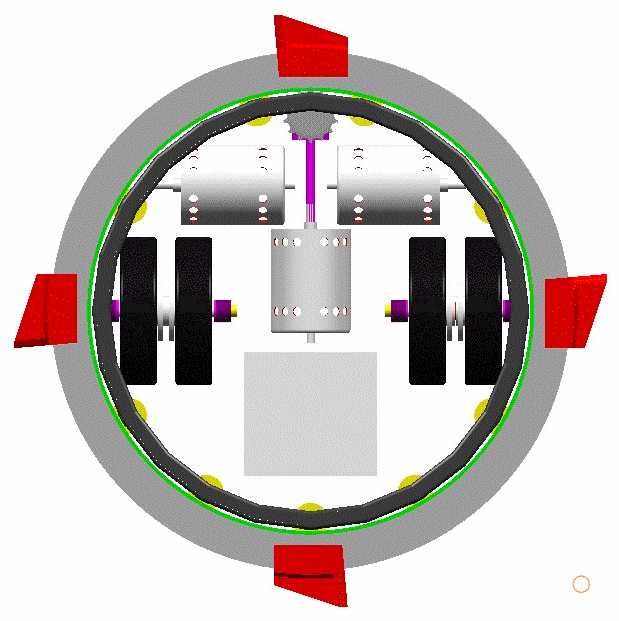
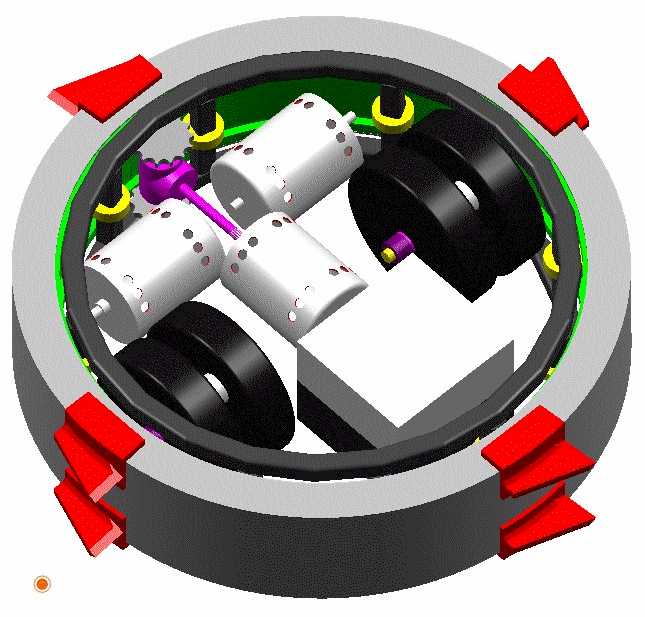
Here we have two wheeled drive
but with the traction of four wheels. This allows us to drive the wheels using a
chain/sprocket mounted inbetween each wheel to each motor which will distribute the loads
evenly across each spindle. The batteries have been mounted on top of each other to make
room for electronics and the extra pair of wheels. |
 

|
17/01/01 |
The four wheeled version was dropped for the two wheeled
version to allow the bot to spin on it's spot a lot easier. The idea is so that we can
rotate the weapon at about 250rpm and if we add to that the rotation of the bot which with
our estimates will be a further 250rpm then the outer disk speed could potentially rotate
at ermm? 500rpm!! We have now just realised what our victory pose would be (what victory
we hear you cry) - To make the weapon and the bot spin in opposite directions which would
give the illusion that the weapon stays still and the inner part spins madly around. |
 

|
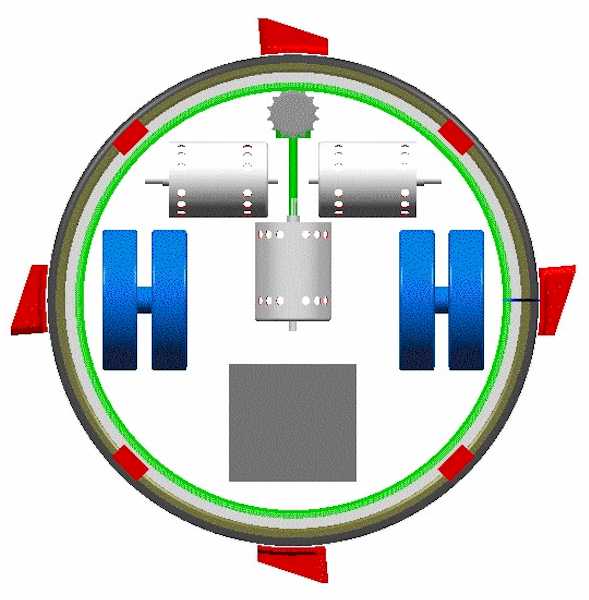
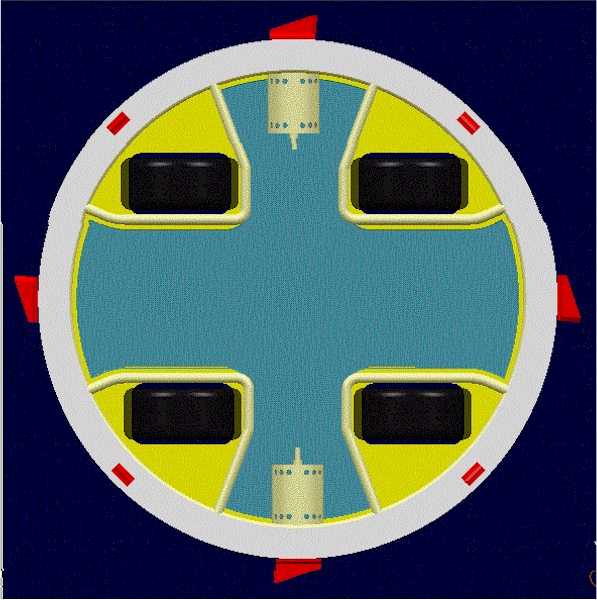
12/01/01 |
This is now where we start to add real size components,
wheels, motors and batteries have all been sized and packaged. This was one positioning
scenario based on a four wheeled drive bot. One problem with this design is the batteries
are just a little too tall for this layout and are therefor vulnerable. Also using the
"skid steer" system would use up a lot of amps and would be harder to spin the
bot on the spot. |

|
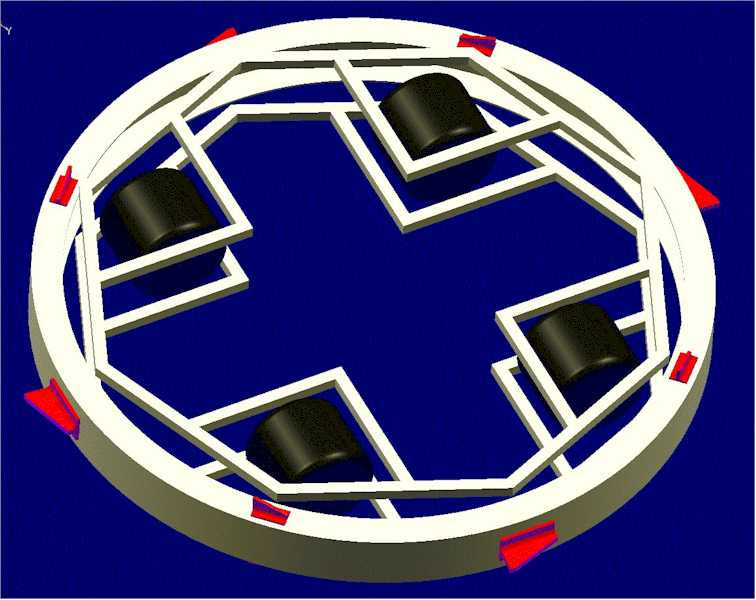
11/01/01 |
It is now just a case of evolving the design and trying out
new packaging of components within the bot. Spot the difference between this and the last
one (Other than the colours). Its all down to the chassis positioning. |
 

|
04/01/01 |
The favourite weapon design was
chosen and this was to be an outer spinning cutting disk with all of the componantry
internal to the weapon. To damage us you need to get close to us, with obvious
consequences!!!! |
 
|
18/12/00 |
These two were very early concept designs, the
idea was that the bot was to have interchangable weapons. All sounds good in principle but
this was going to be hard to make and there would always be a favourite weapon thus
negating the need for a second one anyway. |